Слободянюк А.И. Экспериментальная задача-08-1
Слободянюк А.И. Эксперименная задача или экспериментальное исследование? //Фізіка: праблемы выкладання. — 2008. — №1. — С. 31—43.
Физика — наука экспериментальная. Ни один учитель физики не оспаривает этого банального утверждения. Тем не менее зачастую в процессе обучения физический эксперимент уходит на второй план, особенно в исполнении школьников. Лабораторные работы, входящие в обязательную программу, не слишком сложны и, как правило, снабжены очень подробными инструкциями, что практически исключает возможность проявления самостоятельной творческой деятельности.
С другой стороны, в новые программы и даже в образовательные стандарты по физике включены экспериментальные исследования, обязательные для выполнения учащимися. Задания для этих исследований формулируются как темы, в рамках которых учащийся имеет возможность самостоятельно конкретизировать постановку задачи, разработать методику проведения эксперимента и обработки его результатов. Иными словами, оказывается в состоянии "свободного полета".
Промежуточное положение между жесткой регламентацией фронтальной лабораторной работы и свободой выбора в экспериментальном исследовании занимают экспериментальные задачи, предлагаемые на физических олимпиадах различного уровня.
В данной статье подробно рассматривается одна из задач, входившая в набор заданий экспериментального тура заключительного этапа Республиканской физической олимпиады 2007 года для учащихся XI классов.
"КРУЧЕНИЕ И ВЕРЧЕНИЕ"
Движение тела не всегда бывает равномерным или равноускоренным. Однако эти упрощающие модели часто используются для описания реальных законов движения. В данной работе вам предстоит экспериментально исследовать один из таких законов, проанализировать возможность применения знакомых вам моделей и, наконец, попытаться установить эмпирический (опытный) закон движения.
Приборы и оборудование: штатив с лапкой, линейка 40 см, секундомер, нитки, 2 металлических стержня.
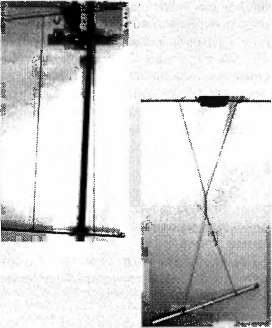
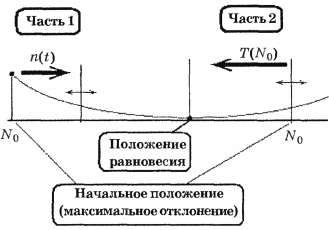
Подвесьте тяжелый стержень на двух параллельных нитях. Верхние концы нитей прикрепите ко второму стержню. Длины нитей должны быть примерно равны 30—40 см, расстояние между ними — около 15 см.
Вам необходимо исследовать процесс раскручивания стержня, для этого первоначального его надо закрутить (при этом нити, естественно, окажутся перекрученными). Все измерения по изучению раскручивания следует начинать с нулевой скорости вращения.
При закручивании стержня (перекручивании нитей) стремитесь, чтобы нити все время оставались натянутыми. Проще всего этого добиться, если подвешенный стержень просто толкнуть, при необходимости подталкивая его (не забывая при этом подсчитывать число оборотов). Обозначим начальное число оборотов, сделанных стержнем, N0.
При описании движения стержня в качестве его координаты следует использовать n — число оборотов, которое сделал стержень при движении от верхнего положения (когда нити максимально перекручены). Естественно, это число может быть дробным. В данном случае единицей измерения скорости служит![]() , а единицей измерения ускорения
, а единицей измерения ускорения
Часть 1. Закон движения
1.1. Эксперимент. Исследуйте закон движения стержня при фиксированном числе оборотов начальной закрутки стержня N0 (эта величина должна быть примерно равна 60-70 оборотам). Для этого измерьте зависимость времени раскручивания tn от числа сделанных оборотов n, при фиксированном числе начального числа оборотов N0 и нулевой начальной скорости. Постройте график закона движения стержня n(t).
1.2. Приближение равномерного движения. Проанализируйте возможность использования модели равномерного движения для описания реального движения стержня. Для этого:
а) запишите функцию закона равномерного движения (при нулевой начальной координате);
б) постройте график закона равномерного движения (при нулевой начальной координате), описывающий движение стержня с наименьшей погрешностью;
в) определите скорость равномерного движения, при которой модель равномерного движения имеет минимальную ошибку;
г) укажите максимальную ошибку в определении координаты стержня п, возникающую при использовании модели равномерно движения.
Проведите данное исследование для всего интервала движения стержня (n ∈ [0, N0]) и для промежутка времени, когда число сделанных стержнем оборотов изменяется от 30 до 50 (n ∈ [30, 50]).
1.3. Приближение равноускоренного движения. Проанализируйте возможность использования модели равноускоренного движения для описания реального движения стержня. Для этого;
а) запишите функцию закона равноускоренного движения (при нулевой начальной координате и нулевой начальной скорости);
б) постройте график закона равноускоренного движения (при нулевой начальной координате и нулевой начальной скорости), описывающий движение стержня с наименьшей погрешностью;
в) определите ускорение, при котором модель равноускоренного движения имеет минимальную ошибку;
в) укажите максимальную ошибку в определении координаты стержня п, возникающую при использовании модели равноускоренного движения.
Проведите данное исследование для всего интервала движения стержня (n ∈ [0, N0]).
1.4. Приближение модели гармонического колебания. Проанализируйте возможность использования модели гармонического колебания для описания реального движения стержня. Для этого
а) запишите функцию закона гармонического колебания (при нулевой начальной скорости);
б) постройте график закона гармонического колебания (при нулевой начальной скорости), описывающий движение стержня с наименьшей погрешностью;
в) определите угловую частоту колебания, при котором модель гармонического колебания имеет минимальную ошибку;
в) укажите максимальную ошибку в определении координаты стержня n, возникающую при использовании модели гармонического колебания.
Проведите данное исследование для всего интервала движения стержня (n ∈ [0, N0] ).
1.5. Степенная зависимость. Допустим, что закон движения стержня (на всем интервале движения стержня) может быть приближенно представлен в виде

где С, γ— постоянные величины. При каком значении параметра у эта формула наиболее точно описывает реальный закон движения? Чему равна максимальная ошибка такого описания движения?
Часть 2. Время раскрутки и потенциальная функция
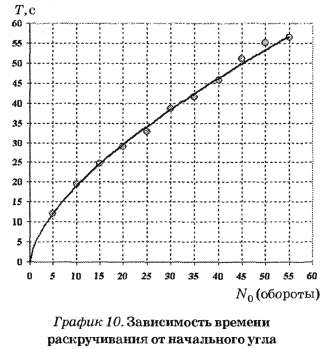
2.1. Исследуйте зависимость времени полного раскручивания стержня τ (от начального положения до нижней точки, в которой нити вертикальны) от начального числа оборотов закрутки N0.
2.2. Постройте график полученной зависимости τ(N0).
2.3. Допустим, что вращение стержня является консервативным (т.е. можно пренебречь сопротивлением воздуха). В этом случае потенциальная энергия стержня однозначно определяется его координатой. Предположим, что зависимость потенциальной энергии стержня от его координаты имеет вид

где К, β — постоянные величины. Определите значение показателя степени р, при котором функция (2) наиболее точно соответствует зависимости, полученной в пункте 2.1.
РЕЗУЛЬТАТЫ И ОБСУЖДЕНИЕ
Часть 1. Исследования закона движения
Построить в данном случае строгую теоретическую модель движения крайне затруднительно (это практически полностью исключает придумывание результатов измерений, чем иногда грешат участники олимпиад), поэтому следует основываться на результатах тщательно проведенных измерений. Отметим, что непосредственное проведение измерений в данном случае не вызывает особых проблем, правда, занимает много времени — каждое измерение следует начинать с начального значения угла закручивания.
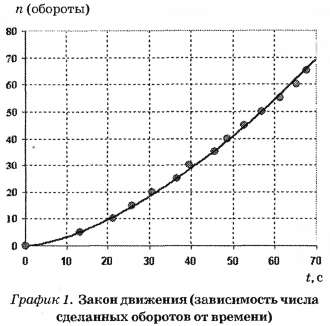
В таблице 1 представлены результаты измерений времени раскручивания (начальная закрутка равнялась 68 оборотам — так уж получилось) до нужного числа n. Ниже построен график 1 закона движения.
Таблица 1
|
Число сделанных оборотов n |
Время раскручивания t, с |
|
5 |
13,23 |
|
10 |
21,38 |
|
15 |
25,85 |
|
20 |
30,65 |
|
25 |
36,60 |
|
30 |
39,54 |
|
35 |
45,59 |
|
40 |
48,7 |
|
45 |
52,69 |
|
50 |
56,89 |
|
55 |
61,30 |
|
60 |
65,15 |
|
65 |
67,73 |
Итак, экспериментальные данные получены. Приступим к их анализу — насколько хорошо знакомые модели движения могут описывать движение стержня.
{mospagebreak}
1.2. Приближение равномерного движения
Координата тела (напомним, в данном случае это число оборотов стержня) при равномерном движении изменяется по закону (при нулевой начальной координате)

График этой функции изображается прямой, проходящей через начало координат. Поэтому на графике 2, изображающем экспериментальный закон движения, построим прямую, наиболее близко* проходящую среди экспериментальных точек. По построенному графику определяем, что в модели равномерного движения скорость может быть принята
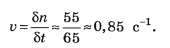
Обратите внимание, что "теоретическая" прямая не проходит через конечную точку — в этом случае максимальное отклонение было бы больше.
Далее в таблицу 2 заносим "теоретические" значения координат, рассчитанные по формуле (1), и находим разности между "теоретическими" и экспериментальными значениями для каждой экспериментальной точки Δn=nтеор- n, которые также представлены в таблице.
Таблица 2
|
T, c |
n |
nтеор |
Δn |
|
0 |
0 |
0,0 |
0,0 |
|
13,23 |
5 |
11,2 |
6,2 |
|
21,38 |
10 |
18,1 |
8,1 |
|
25,85 |
15 |
21,8 |
6,8 |
|
30,65 |
20 |
25,9 |
5,9 |
|
36,60 |
25 |
30,9 |
5,9 |
|
39,54 |
30 |
33,4 |
3,4 |
|
45,59 |
35 |
38,5 |
3,5 |
|
48,70 |
40 |
41,2 |
1,2 |
|
52,69 |
45 |
44,5 |
-0,5 |
|
56,89 |
50 |
48,1 |
-1,9 |
|
61,30 |
55 |
51,8 |
-3,2 |
|
65,15 |
60 |
55,1 |
-4,9 |
|
67,73 |
65 |
57,2 |
-7,8 |
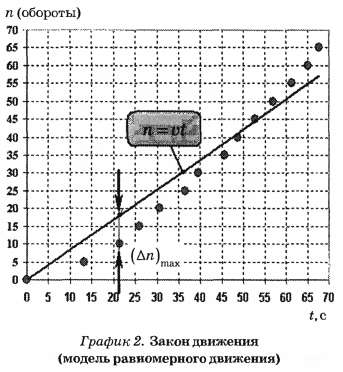
Как видим, отклонения экспериментальных точек от построенной зависимости достаточно велики и явно превышают погрешности измерений закона движения. Так, на первой половине движения относительные отклонения достигают 100 %. Максимальное абсолютное отклонение (Δn)max≈ 8 оборотов.
Если же применить модель равномерного движения к описанию вращения стержня на второй половине его движения, то результаты получаются гораздо лучше. Анализ модели в данном случае проводится аналогично: проводим прямую, близко проходящую к экспериментальным точкам, начиная с n1= 30 (график 3). Уравнение этой прямой

где (n1, t1) — "начальные условия" для этого участка движения. По наклону прямой определяем модельную скорость
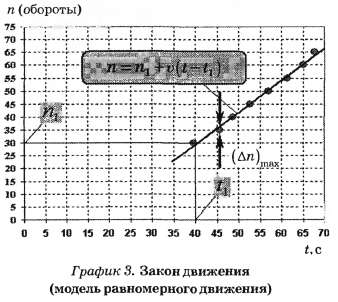
Затем рассчитываем теоретические значения координат и их отклонения от экспериментальных (табл. 3).
Максимальное отклонение в данном случае составляет величину (Δn)mах = 1,3 оборота.
Таким образом, в данном случае модель равномерного движения вполне применима.
Таблица 3
|
Т, с |
n |
nтеор |
Δn |
|
36,60 |
25 |
25,08 |
0,08 |
|
39,54 |
30 |
28,73 |
-1,27 |
|
45,59 |
35 |
36,23 |
1,23 |
|
48,70 |
40 |
40,09 |
0,09 |
|
52,69 |
45 |
45,04 |
0,04 |
|
56,89 |
50 |
50,24 |
0,24 |
|
61,30 |
55 |
55,71 |
0,71 |
|
65,15 |
60 |
60,49 |
0,49 |
|
67,73 |
65 |
63,69 |
-1,31 |
Можно предложить следующее теорети ческое "объяснение" полученного резулътата: после этапа разгона сопротивление воз духа стабилизирует скорость вращения Однако этот вывод не обоснован — на небольших временных участках любая монотонная функция может быть приближена линейной зависимостью. Возможно, что точность эксперимента не позволяет обнаружить присутствующее ускорение.
1.3. Приближение равноускоренного движения
Экспериментальные данные однозначно свидетельствуют о возрастании скорости вращения. Рассмотрим, можно ли считать это возрастание равномерным, т.е. считать движение равноускоренным, описываемым квадратичной функцией.
При нулевых начальных скорости и координате закон равноускоренного движения имеет вид

Построить "на глаз" параболу, наиболее близко подходящую к заданным точкам, затруднительно, поэтому сначала необходимо линеаризовать исследуемую зависимость.
В данном случае эта процедура очевидна: построим график зависимости координаты стержня от квадрата скорости. Если функция (3) применима, то экспериментальные точки на таком графике должны выстаиваться близко к прямой. Если не слишком привередничать, то можно считать, что это наблюдается на графике 4.
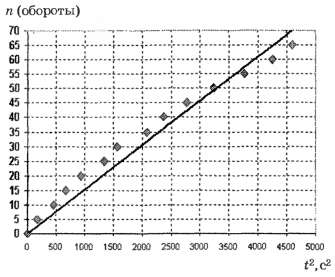
Хорошо видно, что отклонения точек от прямой носят не случайный, а вполне закономерный характер, следовательно, движение не является строго равноускоренным. Но модель равноускоренного движения может приближенно описывать наблюдаемое движение.
Для определения оптимального "модельного" ускорения проведем на этом графике прямую через начало координат, проходящую близко к экспериментальным точкам. В соответствии с выражением (3) коэффициент наклона этой прямой равен 1/2*а. Поэтому примерно ускорение стержня
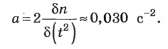
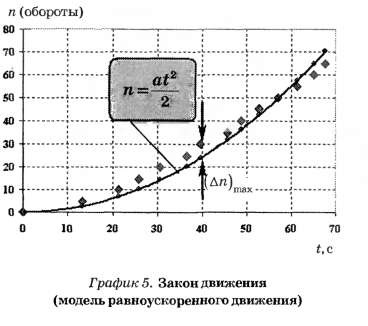
Дальнейший ход работы понятен: рассчитываем по формуле (3) теоретические значения координат и их отклонения (табл. 4) и строим теоретический график 5 закона движения в модели равноускоренного движения. Максимальная погрешность использованной модели составляет (Δn)mах≈ 6 оборотов, что заметно меньше, чем погрешность модели равномерного движения (на всем интервале движения).
Если применить модель равноускоренного движения к начальному этапу разгона (скажем, до n = 30), то можно получить гораздо лучшее соответствие между моделью и реальными данными. Действительно, первые 6 точек лежат очень близко к прямой. Следовательно, модель равноускоренного движения может применяться к описанию вращения стержня, особенного на начальном этапе его разгона.
Таблица 4
|
t, c |
n |
nтеор |
Δn |
|
0 |
0 |
0 |
0 |
|
13,23 |
5 |
2,7 |
-2,3 |
|
21,38 |
10 |
7,0 |
-3,0 |
|
25,85 |
15 |
10,2 |
-4,8 |
|
30,65 |
20 |
14,4 |
-5,6 |
|
36,60 |
25 |
20,5 |
-4,5 |
|
39,54 |
30 |
23,9 |
-6,1 |
|
45,59 |
35 |
31,8 |
-3,2 |
|
48,70 |
40 |
36,3 |
-3,7 |
|
52,69 |
45 |
42,5 |
-2,5 |
|
56,89 |
50 |
49,5 |
-0,5 |
|
61,30 |
55 |
57,5 |
2,5 |
|
65,15 |
60 |
64,9 |
4,9 |
|
67,73 |
65 |
70,2 |
5,2 |
Дадим и теоретическое "обоснование" этого вывода: ускорение стержня определяется силами натяжения нитей (только эти силы создают ненулевой вращающий момент); эти силы зависят от массы стержня (изменением которой во время движения можно пренебречь) и углами между нитями и стержнем; когда нити скручены, эти углы изменяются мало. Следовательно, момент силы, раскручивающий стержень, остается примерно постоянным, чем и объясняется примерное постоянство ускорения. Признаем, данное объяснение достойно возражений: моменты сил малы (так как стержень тонкий), поэтому их малое изменение может существенно повлиять на характер движения. Дискуссия в таком стиле бесплодна — нужны серьезные (и очень непростые ) расчеты. Возможно, что применимость анализируемой модели в данном случае объясняется тем, что квадратичная функция точнее аппроксимирует сложную неизвестную функцию.
{mospagebreak}
1.4. Приближение модели гармонического колебания
Движение стержня действительно является колебательным. Достигнув нижней точки (когда нити раскрутились), он по инерции продолжит вращаться и опять закрутит нити (в противоположном направлении). Если бы не неизбежные потери механической энергии из-за сопротивления воздуха (опять!?), неупругих деформаций нити и трения между ними, такое колебательное движение стержня продолжалось бы бесконечно долго. Раскручивание стержня от начальной закрутки до нижней точки составляет четверть периода его колебания. Поэтому в данном разделе фактически речь идет о том, можно ли экспериментальный закон движения описать гармонической функцией вида

Такой ее выбор определен начальными условиями: нулевой начальной скоростью. Заметим, что положению равновесия соответствует n=N0, так как мы отсчитываем обороты от начального положения максимально закрученных нитей. Величина (N0-n) соответствует координате, отсчитываемой от нижнего положения стержня, когда нити вертикальны.
Для анализа применимости модели (4) линеаризуем ее, приведя к виду

Теперь необходимо по экспериментальным данным построить график зависимости ![]() отвремени и рассмотреть, можно ли его приближенно заменить прямой линией, проходящей через начало координат. Результат построения показан на графике 6. Действительно, экспериментальные точки выстраиваются в линию, близкую к прямой, хотя и в данном случае отклонения носят систематический характер. Этот график показывает, что модель гармонического колебания также может примяться для приближенного описания наблюдаемого движения. По наклону построенной прямой определяем оптимальное значение круговой частоты колебания:
отвремени и рассмотреть, можно ли его приближенно заменить прямой линией, проходящей через начало координат. Результат построения показан на графике 6. Действительно, экспериментальные точки выстраиваются в линию, близкую к прямой, хотя и в данном случае отклонения носят систематический характер. Этот график показывает, что модель гармонического колебания также может примяться для приближенного описания наблюдаемого движения. По наклону построенной прямой определяем оптимальное значение круговой частоты колебания:

Далее выполняем техническую работу — по найденному значению частоты и с помощью формулы (4) рассчитываем теоретические значения координат и их отклонений от экспериментальных значений. Результаты представлены в таблице 5 и на графике 7. В таблице n1=N0- n — координата стержня, отсчитываемая от положения его равновесия.
Таблица 5
|
t, с |
n |
n1 |
(n1)теор |
Δn |
|
0 |
0 |
68 |
68,0 |
0,0 |
|
13,23 |
5 |
63 |
64,8 |
1,8 |
|
21,38 |
10 |
58 |
59,9 |
1,9 |
|
25,85 |
15 |
53 |
56,2 |
3,2 |
|
30,65 |
20 |
48 |
51,7 |
3,7 |
|
36,60 |
25 |
43 |
45,1 |
2,1 |
|
39,54 |
30 |
38 |
41,6 |
3,6 |
|
45,59 |
35 |
33 |
33,7 |
0,7 |
|
48,70 |
40 |
28 |
29,3 |
1,3 |
|
52,69 |
45 |
23 |
23,6 |
0,6 |
|
56,89 |
50 |
18 |
17,3 |
-0,7 |
|
61,30 |
55 |
13 |
10,5 |
-2,5 |
|
65,15 |
60 |
8 |
4,5 |
-3,5 |
|
67,73 |
65 |
3 |
0,4 |
-2,6 |
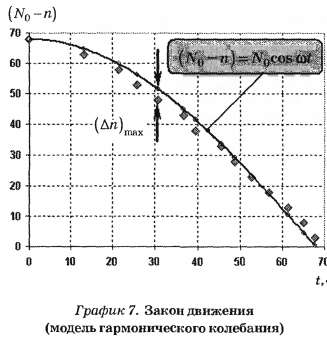
С удивлением обнаруживаем, что эта модель описывает движение лучше, чем модель равноускоренного движения. Ее максимальная погрешность составляет (Δn)mах ≈ 4 оборота — менее 10%.
Применению модели гармонического колебания также можно дать теоретическое обоснование. Мы уже показали, что движение стержня является колебательным. Когда нити раскручены (вертикальны), стержень обладает минимальной потенциальной энергией. Вблизи минимума потенциальная функция может быть примерно заменена параболой. А если потенциальная энергия тела пропорциональна квадрату отклонения от положения равновесия, то тело совершает Гармоническое колебания. В этих рассуждениях скрыты два существенных недостатка: во-первых, рассматриваемые колебания не являются "малыми", поэтому не обоснована возможность описания потенциальной функции как квадратичной во всем интервале движения; во-вторых, не всякая функция даже вблизи минимума может быть заменена квадратичной. Так, например, функция у=х4 существенно отличается от функции у = х2, хотя обе имеют минимум в нуле. Поэтому возможно, что хорошее соответствие между теоретическими и экспериментальными значениями обусловлено тем, что участок синусоиды и парабола не отличимые "на глаз".
1.5. Степенная зависимость
В данном пункте предлагается оставить в стороне теоретические дискуссии в рамках курса физики средней школы и обратиться к своеобразной "палочке-выручалочке" — степенной функции, позволяющей описывать многие нелинейные зависимости.
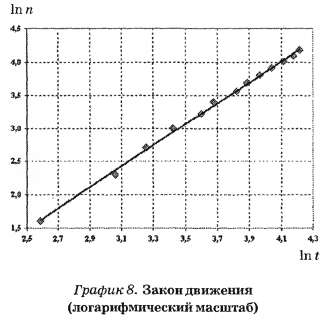
Для определения показателя степени приведенной в условии функции n=Cty, необходимо представить закон движения в логарифмическом масштабе

На построенном графике 8 видно, что экспериментальные точки замечательно ложатся на прямую, что свидетельствует о возможности использования степенной функции для описания закона движения, найденного в эксперименте.
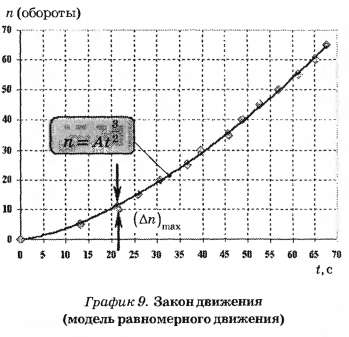
Коэффициент наклона данной прямой, совпадающий с показателем степени, в данном случае равен γ = 1,57. Трудно принять такую экзотическую функцию в качестве закона движения. Поэтому примем в качестве показателя степени очень близкое и более красивое значение γ = 3/2, следовательно, в данной модели теоретический закон движения имеет вид

Так как мы незначительно (но самовольно) изменили показатель степени, то надо изменить и коэффициент пропорциональности С, получающийся из графика 8.
Наиболее точно он может быть найден с помощью линеаризации зависимости (5) с последующей обработкой по МНК, однако два часа, отведенные на решение данной задачи, давно истекли, поэтому поступим проще: подберем его по одной из экспериментальных точек (например, последней — она почти точно попала на построенную прямую):![]() Дальнейшее известно: по найденным параметрам по формуле (5) рассчитываем теоретические значения и сравниваем их с экспериментальными (табл. 6, график 9). Получаем наилучшее соответствие между результатами измерений и расчетов.
Дальнейшее известно: по найденным параметрам по формуле (5) рассчитываем теоретические значения и сравниваем их с экспериментальными (табл. 6, график 9). Получаем наилучшее соответствие между результатами измерений и расчетов.
Таблица 6
|
t |
n |
nтеор |
Δn |
|
0 |
0 |
0,0 |
0,0 |
|
13,23 |
5 |
56 |
0,6 |
|
21,38 |
10 |
11,5 |
1,5 |
|
25,85 |
15 |
15,2 |
0,2 |
|
30,65 |
20 |
19,7 |
-0,3 |
|
36,60 |
25 |
25,7 |
0,7 |
|
39,54 |
30 |
28,8 |
- 1,2 |
|
45,59 |
35 |
35,7 |
0,7 |
|
48,70 |
40 |
39,4 |
-0,6 |
|
52,69 |
45 |
44,4 |
-0,6 |
|
56,89 |
50 |
49,8 |
-0,2 |
|
61,30 |
55 |
55,7 |
0,7 |
|
65,15 |
60 |
61,0 |
1,0 |
|
67,73 |
65 |
64,7 |
-0,3 |
Краткий вывод из проведенного длительного анализа: реальный закон движения строго не описывается ни одной из знакомых моделей движения, хотя с определенной точностью каждая из них может применяться для приближенного описания отдельных этапов движения.
Проведенный анализ также подчеркивает чрезвычайно важное общее положение. Взаимоотношения между экспериментальными и теоретическими методами физических исследований очень сложны: с одной стороны, качественными теоретическими рассуждениями можно "обосновать" чуть ли не любой экспериментальный результат, с другой — некачественная обработка экспериментальных данных может "подтвердить" многие (и различающиеся) теоретические модели. При необходимости альтернативного выбора между различными моделями следует искать такой эксперимент, чтобы его результаты могли быть истолкованы однозначно, а не "в пределах погрешности". Хорошим примером такого эксперимента послужит вторая часть данной задачи, в которой будет показано, что колебательное движение стержня, рассмотренное в п. 1.3, на самом деле нельзя считать гармоническим.
Что же касается возможной дискуссии между сторонниками "теории постоянства скорости" (в которой координата пропорциональна первой степени времени) и "теории постоянства ускорения" (в которой координата пропорциональна второй степени), то ее итог подвел экспериментатор: истина посередине — координата пропорциональна времени в полуторной степени! Пусть теперь теоретики объясняют почему.
{mospagebreak}
Часть 2. Время раскрутки и потенциальная функция
Поясним различие в измерениях первой и второй частях данной задачи.
В первой части измеряли зависимость времени движения t от фиксированной начальной точки N0 до некоторого переменного конечного положения (задаваемого числом оборотов n). Изучение этой зависимости позволило получить закон движения (зависимость координаты от времени) n(t) при фиксированных начальных условиях. Конечно, при наличии современного оборудования эту зависимость можно было бы снять гораздо быстрее: закрутили стержень, отпустили его и фиксировали его положения через определенные промежутки времени. Но провести такие измерения одному в ручном режиме практически невозможно: необходимо считать обороты, смотреть на секундомер да еще и записывать результаты! Поэтому и пришлось при каждом измерении возвращать стержень в исходное положение.
Сейчас, во второй части работы нам необходимо измерить зависимость времени движения Т от переменной начальной точки N0 до фиксированного конечного положения n=N0, которое к тому же является положением равновесия. Если рассматривать движение стержня как колебательное, то измеряемая здесь величина Т является четвертью периода колебаний. То есть фактически нам предстоит исследовать зависимость периода колебаний от их амплитуды.
Хорошо известно, что при гармонических колебаниях период не зависит от амплитуды, поэтому экспериментальное обнаружение такой зависимости однозначно будет свидетельствовать об ангармонизме колебаний.
2.1, 2.2. В таблице 7 и на графике 10 представлены результаты измерений.
Полученные результаты однозначно показывают, что период колебаний существенно зависит от амплитуды, т. е. колебания не являются гармоническими.
Таблица 7
|
N0 |
Т, с |
ln N0 |
ln Т |
|
5 |
12,14 |
1,61 |
2,50 |
|
10 |
19,55 |
2,30 |
2,97 |
|
15 |
24,75 |
2,71 |
3,21 |
|
20 |
28,98 |
3,00 |
3,37 |
|
25 |
32,95 |
3,22 |
3,49 |
|
30 |
38,63 |
3,40 |
3,65 |
|
35 |
41,59 |
3,56 |
3,73 |
|
40 |
45,74 |
3,69 |
3,82 |
|
45 |
51,13 |
3,81 |
3,93 |
|
50 |
55,08 |
3,91 |
4,01 |
|
55 |
56,49 |
4,01 |
4,03 |
2.3. Теперь нам необходимо связать между собой зависимость периода колебаний от амплитуды с видом потенциальной функции (зависимости потенциальной энергии тела от его координаты).
Потенциальная функция полностью определяет характер движения тела (в том числе и исследуемую зависимость). Нам же предстоит решить обратную задачу: по зависимости периода от амплитуды найти потенциальную функцию. Отметим, что не всегда эта задача имеет однозначное решение. Но в данном случае, когда задан вид искомой потенциальной функции, мы сможем получить однозначный результат.
Сначала решим следующую теоретическую задачу: материальная точка массой т движется без трения вдоль оси X, известна зависимость потенциальной энергии тела от его координаты U(х)=Кхβ, которая имеет минимум в начале координат; требуется найти зависимость периода колебаний от его амплитуды.
Запишем закон сохранения механической энергии![]() для рассматриваемого тела:
для рассматриваемого тела:
Здесь полная механическая энергия Е равна потенциальной энергии в крайнем положении х0. Из последнего уравнения выразим зависимость скорости тела от координаты:
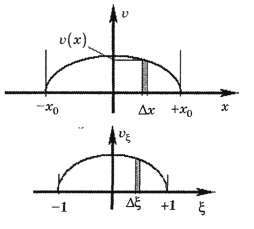
Два знака перед корнем соответствуют двум возможным направлениям движения. Мы будем рассматривать движение в одном, положительном направлении. Итак, потенциальная функция U(x) определяет зависимость скорости тела от его координаты. Эта зависимость, в свою очередь, позволяет выразить зависимость периода колебаний от амплитуды (начального отклонения). Рисунок иллюстрирует наше алгебраическое описание. Разобьем весь интервал движения тела х ∈ [-x0, +х0] на малые интервалы Δxi , в пределах которых изменением скорости можно пренебречь. Тогда время, за которое тело проходит этот интервал:
Тогда время движения от крайнего положения до положения равновесия (четверть периода колебания) определяется как сумма времен движения по всем интервалам разбиения:
В данной формуле предпочтительнее вместо суммы нарисовать интеграл, но не будем пугать — суть дела от этого не изменяется. Вычисление этой суммы — непростая задача, причем необходимо задавать численные значения параметров. Однако для наших целей этого и не требуется, задачу можно решить простой заменой переменной.
Вместо координаты х введем относительную переменную величину ξ = x/x0 -- отношение координаты тела к ее максимальному значению.
Можно также сказать, что в качестве единицы измерения длины выбрана амплитуда колебаний. Замечательно, что пределы изменения этой относительной переменной являются универсальными, независящими от амплитуды ξ ∈ [-1, +1]. Используя эту переменную, формулу для периода колебаний запишем в виде (с учетомΔх = х0·Δξ):
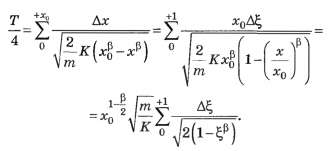
Прелесть этой записи заключается в том, что фигурирующая в ней сумма зависит только от показателя степени и не зависит от других параметров (в том числе от начального отклонения). Обратите внимание, что в
исходной сумме амплитуда колебаний входила как в выражение для скорости, так и в границы суммирования. Сейчас же сумма является некоторым числом, постоянным коэффициентом (пусть и неизвестным — при необходимости его можно рассчитать), которое мы обозначим
Теперь можно записать формулу для периода колебаний:
которая выражает искомую зависимость периода колебаний от амплитуды.
Итак, если потенциальная энергия пропорциональна ![]() , то период
, то период ![]() Следовательно, искомая связь между показателями степеней имеет вид:
Следовательно, искомая связь между показателями степеней имеет вид:

Таким образом, для определения показателя степени в потенциальной функции β достаточно показать, что зависимость периода колебаний от амплитуды имеет степенной вид и найти значение ее показателя α, чем мы сейчас и займемся.
2.3. Для определения показателя степени в зависимости периода от амплитуды ![]() построим экспериментальную зависимость в логарифмическом масштабе
построим экспериментальную зависимость в логарифмическом масштабе

Значения логарифмов также приведены в таблице 7, на графике 11 показана полученная зависимость. С удовлетворением отмечаем, что экспериментальные точки хорошо ложатся на прямую. Коэффициент наклона этой прямой (опять определенный графическим методом) α = 0,64. Данное значение очень близко к простой дроби α = 2/3, которую мы и примем за экспериментальное значение показателя степени.
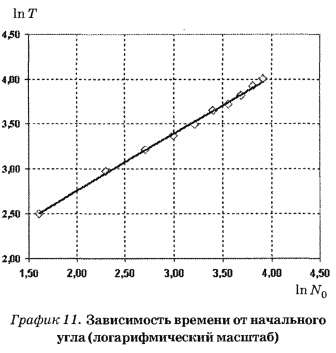
Итак, экспериментальная зависимость периода колебаний от амплитуды для рассматриваемого движения имеет вид:

С помощью формулы (6) находим искомый показатель степени потенциальной функции
Удивительно, но эти показатели равны. Единственное значение равных показателей степеней. Это является эстетическим подтверждением правильности полученного результата.
Найденная потенциальная функция позволяет рассчитать закон движения, рассмотренный в первой части данной задачи. Интересно, будут ли согласовываться полученные таким образом результаты с экспериментальными данными? К сожалению, нет. Проведенный расчет закона движения (его пришлось проводить численно, на компьютере) показывает, что при аппроксимации закона движения степенной функцией (как в п. 1.6) показатель степени близок к 2, хотя и немного меньше этого числа. Значит ли это, что результат "близок к Нобелевской премии", или все-таки виновато сопротивление воздуха?
| Выложил | alsak |
| Опубликовано | 07.04.13 |
| Просмотров | 7839 |
| Рубрика | Олимпиады |
| Тема | Колебания и волны |